BOSM-1601 Mixalefet-Serê Boring Milling Machiner
1. Bikaranîna amûran
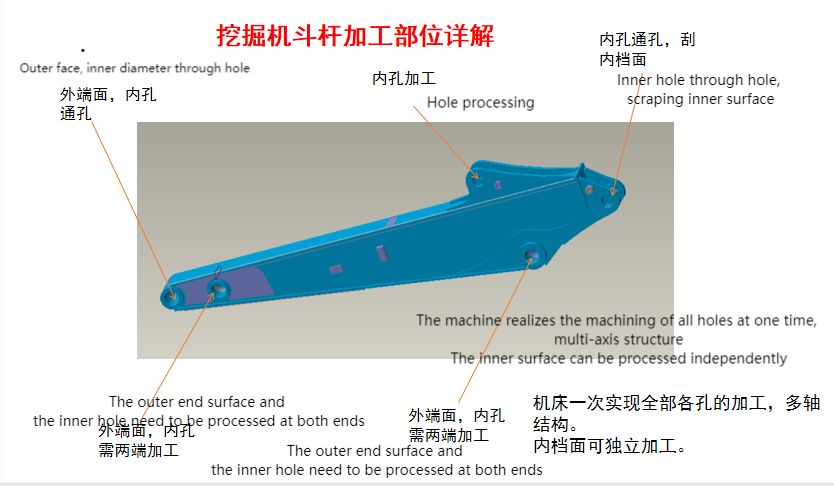
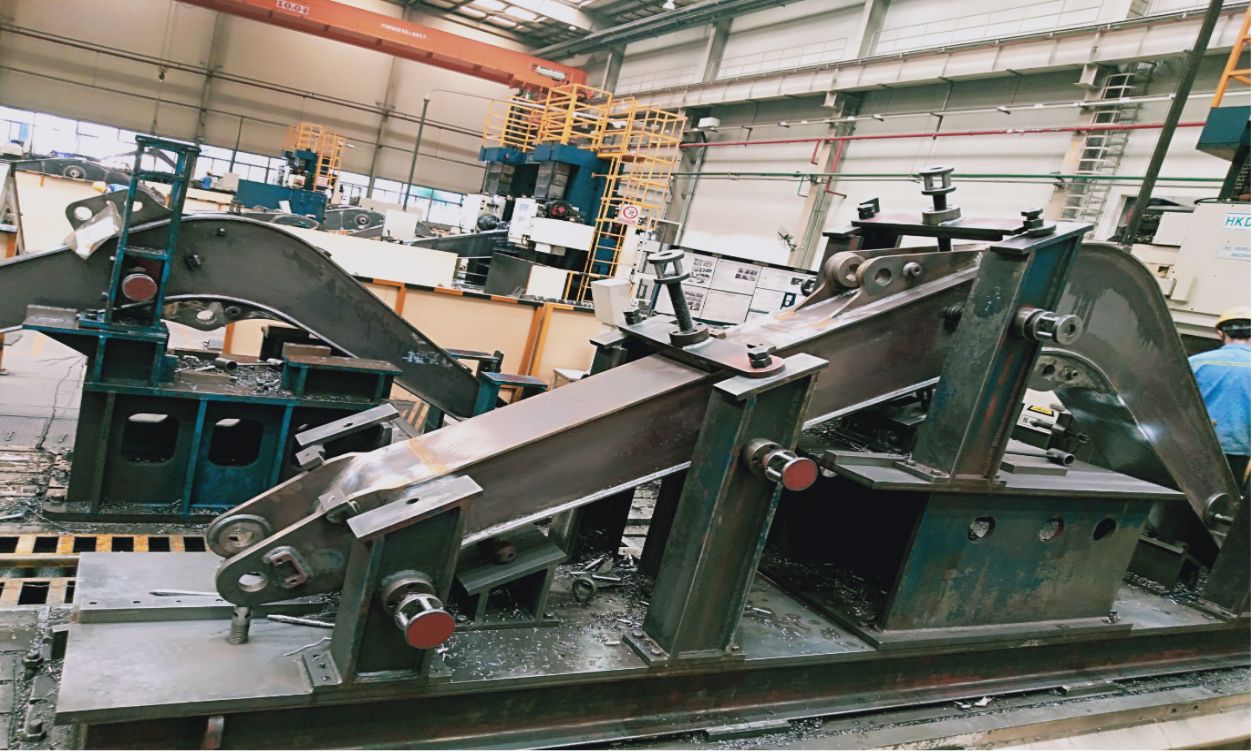
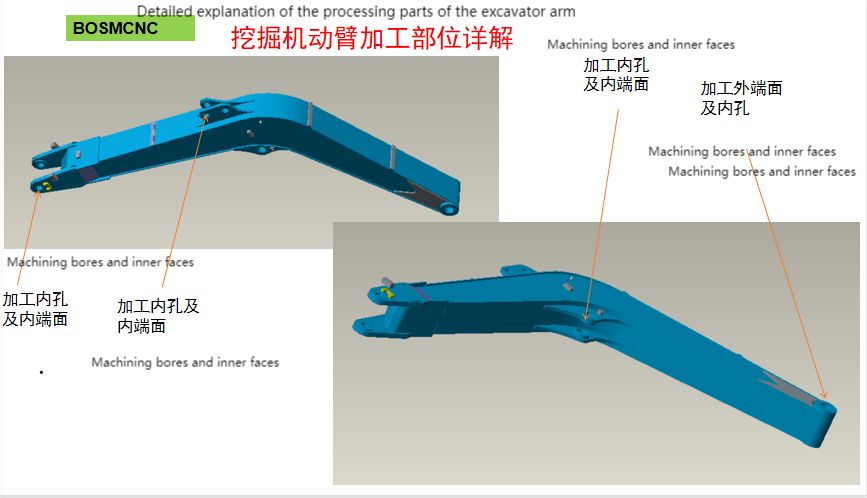
BOSM-1601 Stûna kontrolê ya hejmarî ya du-stûnî ya desta makîneya borandin û birrîn a du-stûnî ya mobîl makîneyek taybetî ye ji bo perçeyên xebatê yên sîmetrîk ên makîneyên çêkirinê. Makîne bi stûnên guhezbar ên taybetî û du komên beranên horizontî ve tê stendine, ku dikarin di nav rêza lêdana bi bandor de kolandina, mêlkirin, birîn û pêvajoyek din a perçeya xebatê di nav rêza lêdana bi bandor de pêk bînin, perçeya kar dikare di yek carî de li cîh were hilanîn (ne hewce ne hewceya duyemîn kelandin), leza barkirin û barkirinê ya bilez, leza pozîsyona bilez, rastbûna pêvajoyek bilind û karbidestiya pêvajoyek bilind.
2. Pêkhateyên sereke yên Makîneyê
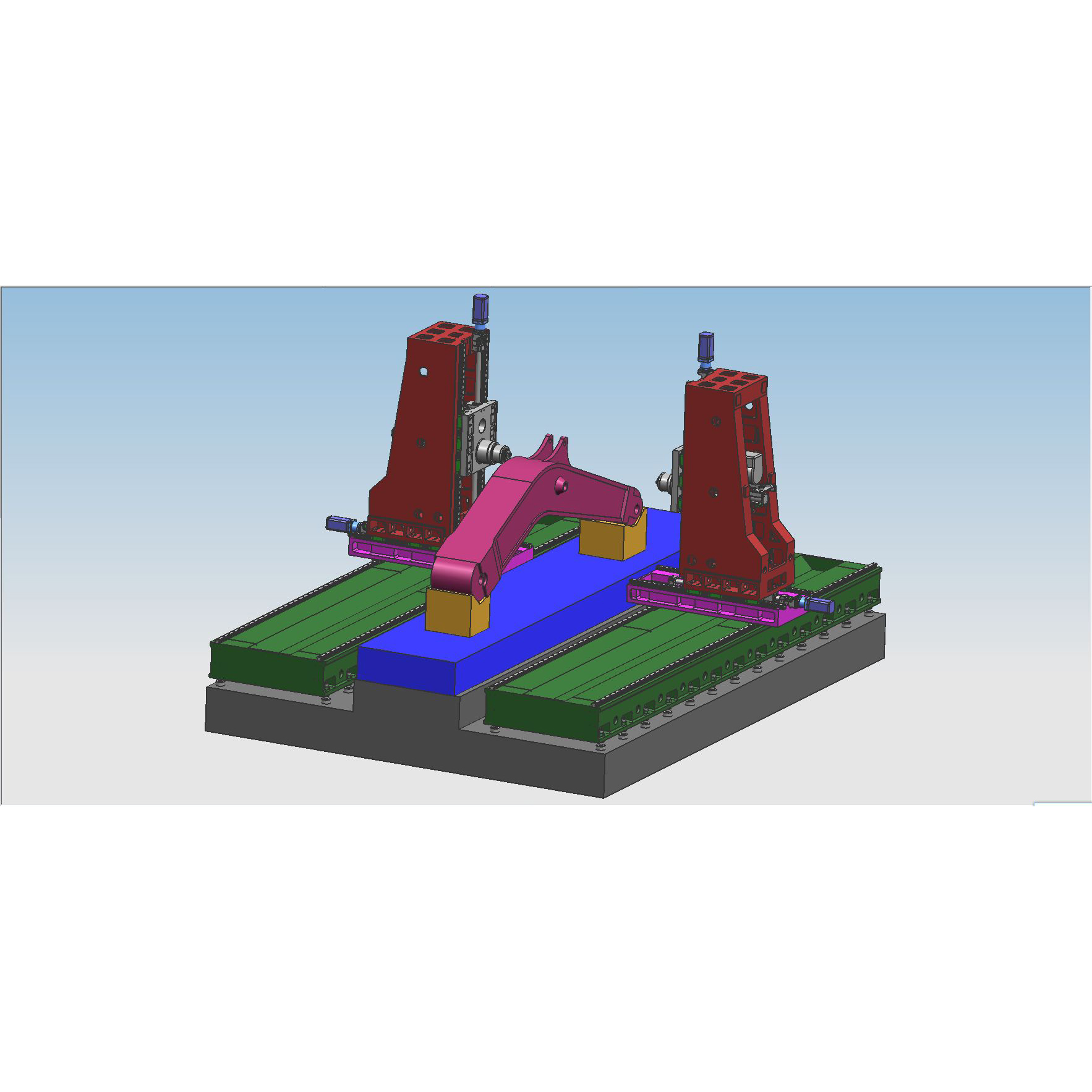
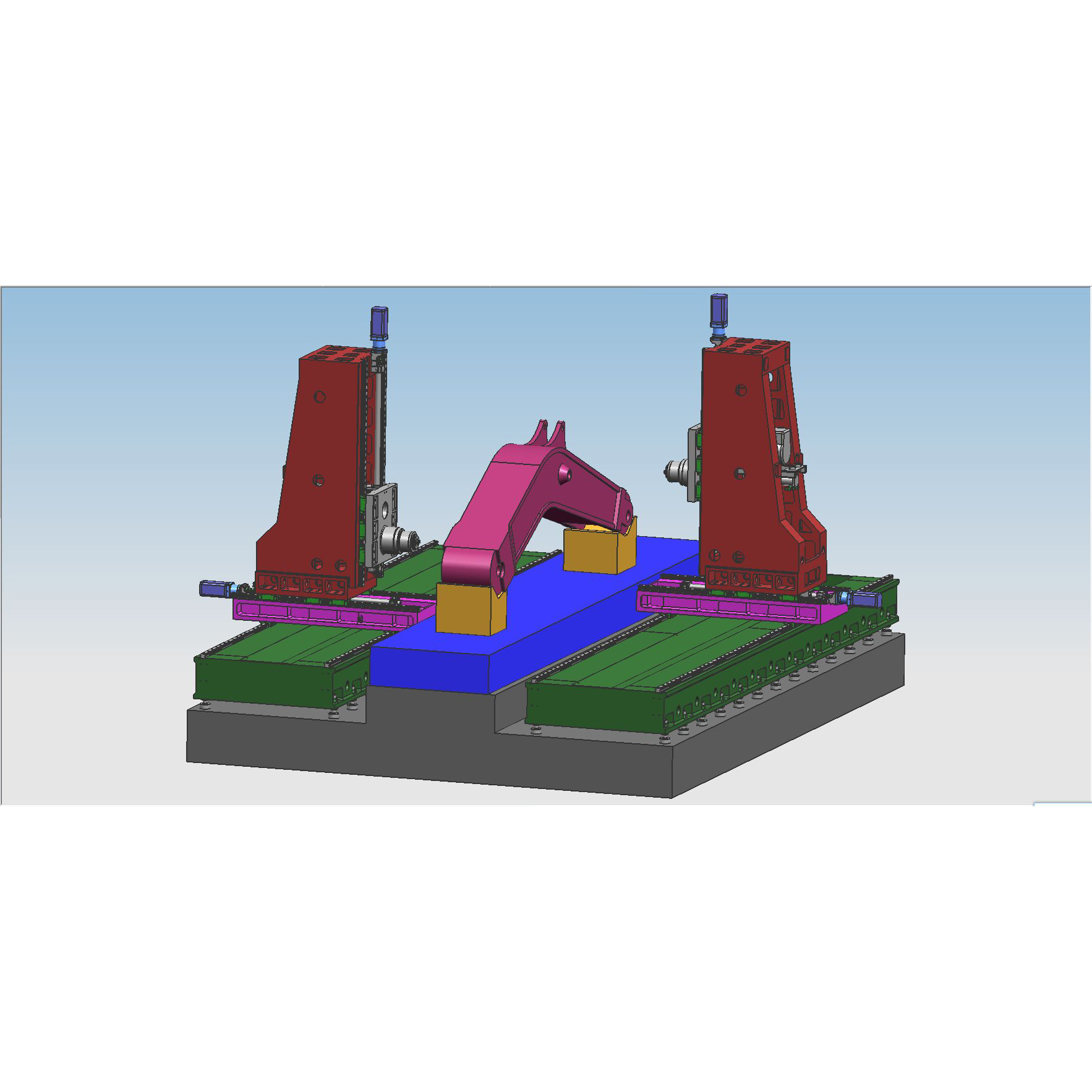
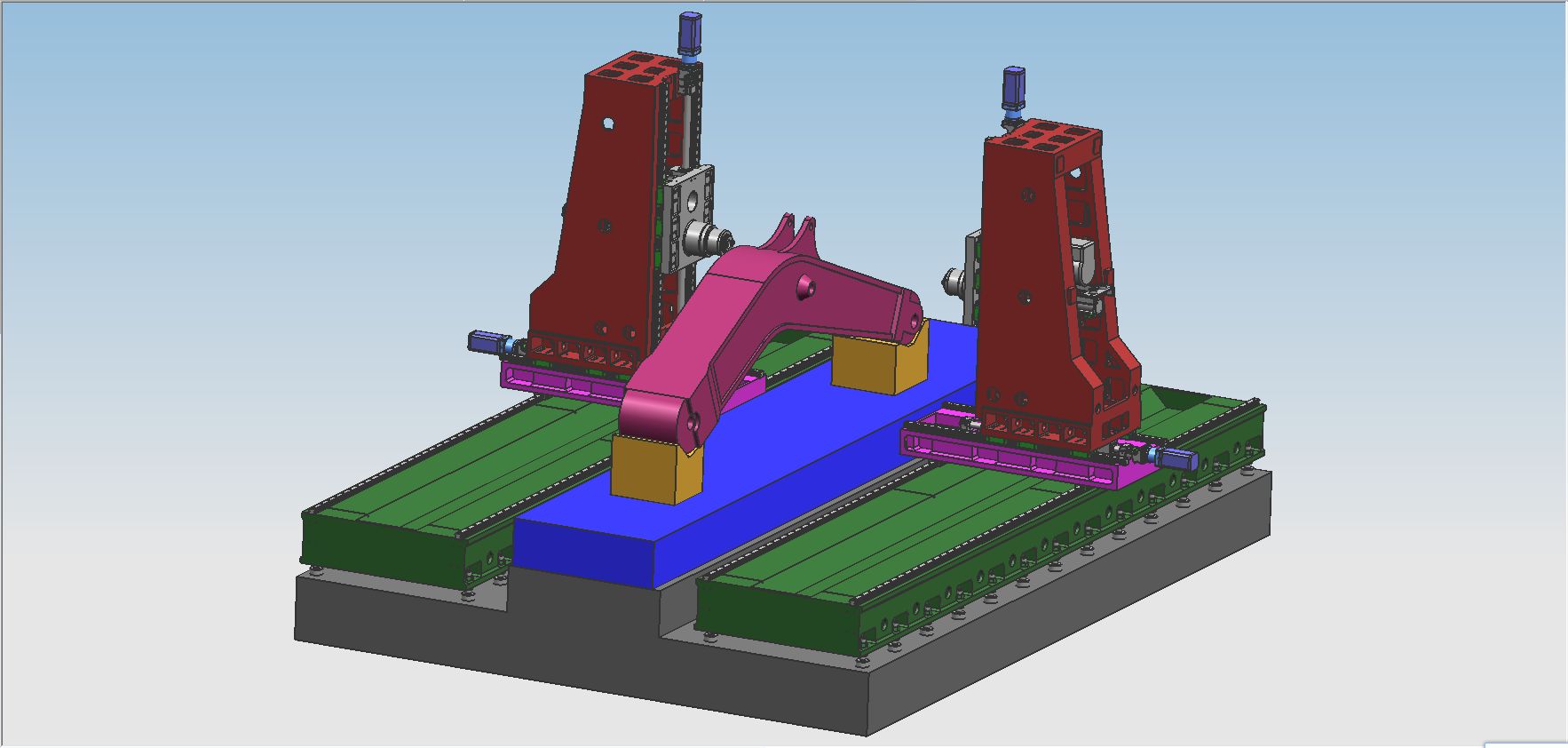
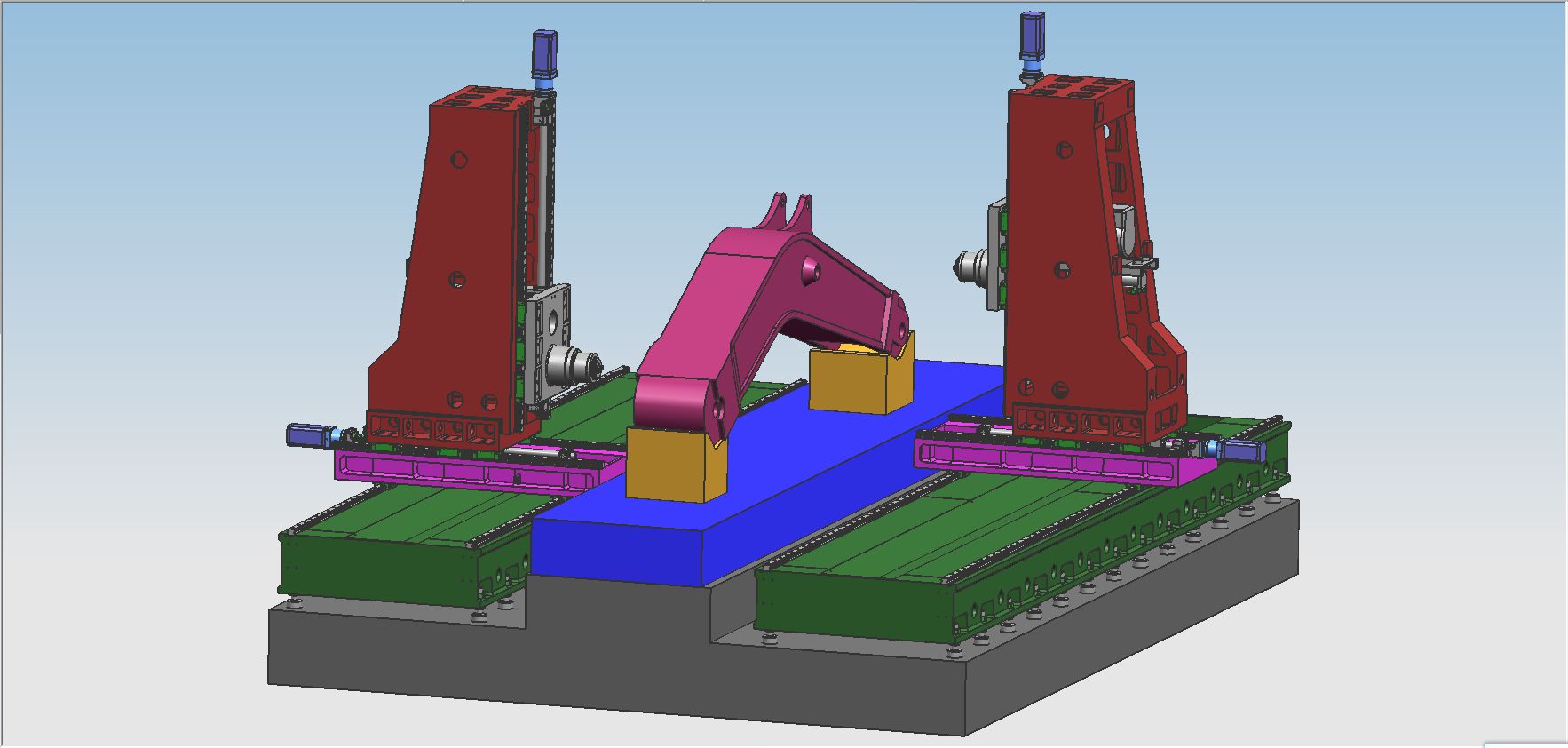
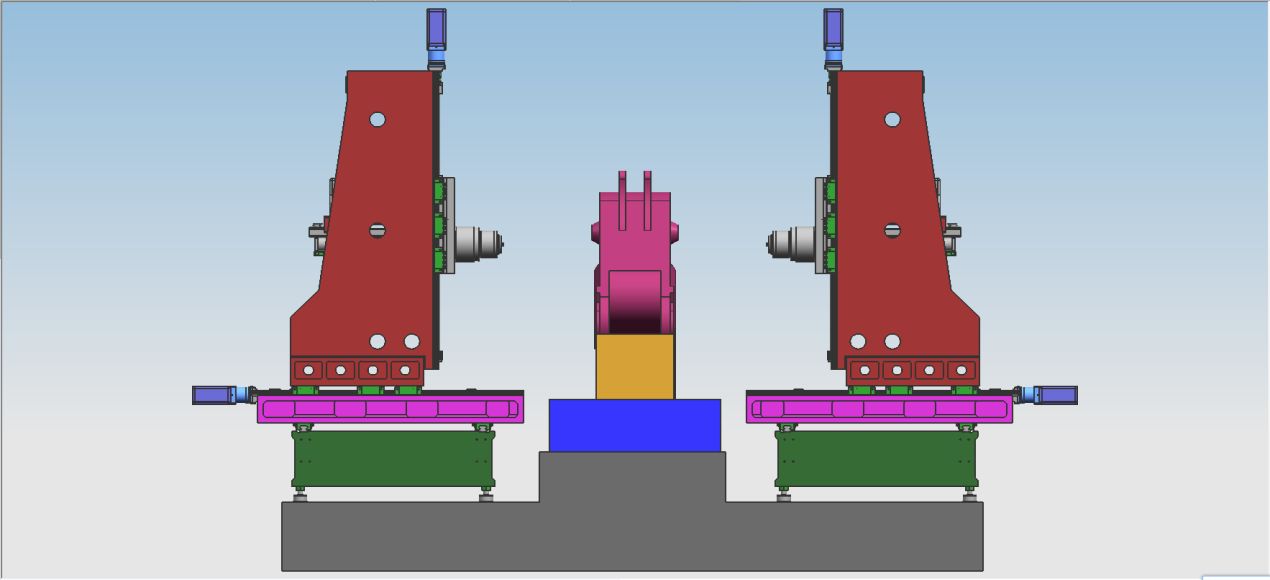
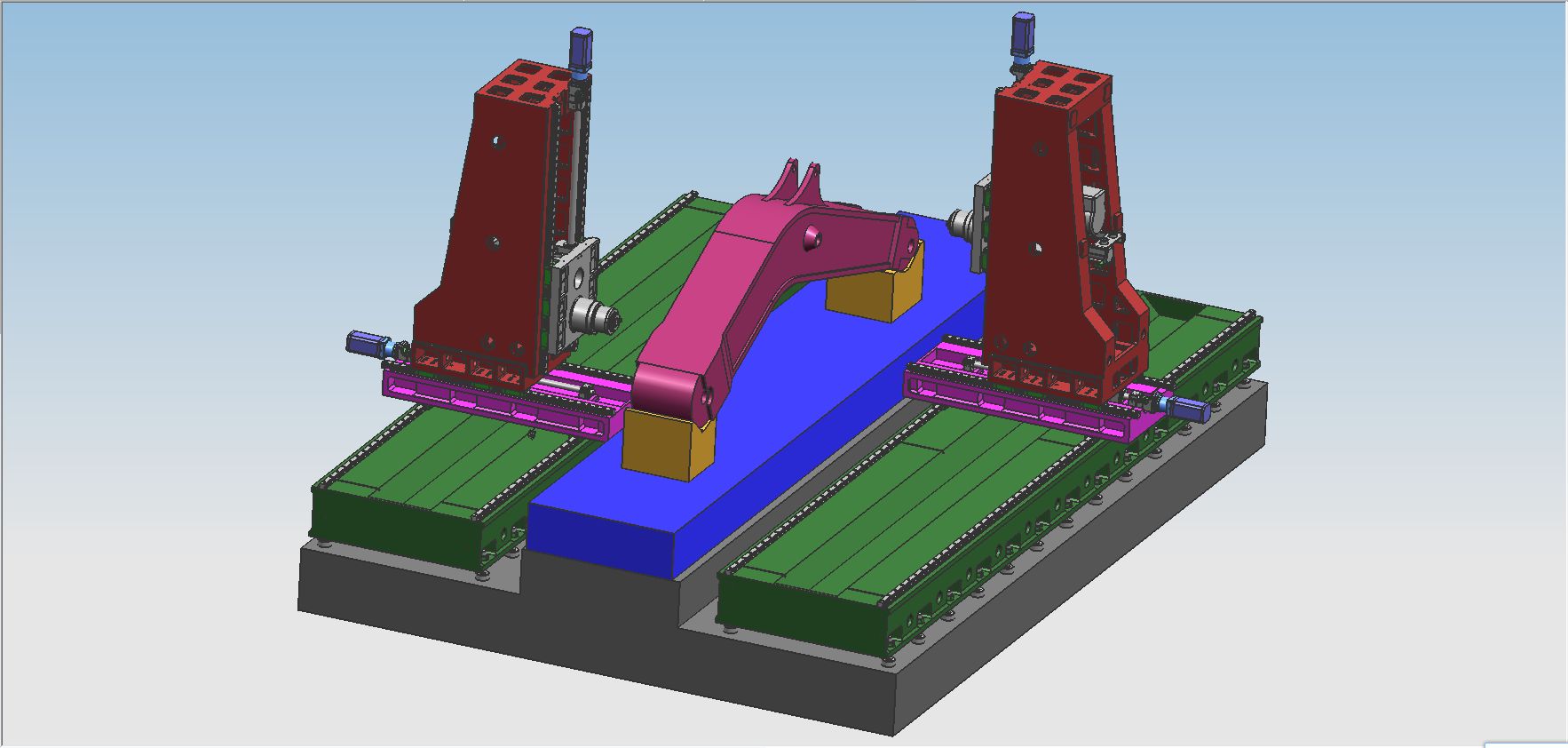
Nivîn, maseya xebatê, stûnên çep û rast, tîrêj, zincî, beran û beşên din ên mezin hemî ji qalibkirina qûmê rezîn, avêtina hesinê gewr-kalîteya bilind 250 têne çêkirin, di çala qûma germ de têne şilandin→ pîrbûna vibrasyonê→ firna germ → pîrbûna vibrasyonê→ makînasyona hişk → pîrbûna vibrasyonê → pîvazkirina firna germ → pîrbûna vibrasyonê → qedandin, stresa neyînî ya parçeyan bi tevahî ji holê rabike, û performansa parçeyan aram bihêle. Makîne fonksiyonên wekî mêlkirin, borandin, sondajê, bertengkirin, lêdan, hwd heye, û rêbaza sarbûna amûrê sarbûna derveyî ye, Makîne 6 axên xwarinê dihewîne, ku dikare girêdana 4-tevger û yek-aksiyonek 6-axek pêk bîne. 2 serikên hêzê hene. Arasteya eksê ya Makîneyê û serê hêzê di wêneya jêrîn de têne xuyang kirin.
2.1Struktura sereke ya beşa xwarinê veguhestina axial
2.1.1 X1/X2 eksê:Stûn bi dirêjahî li ser rêça rêber a nivîna sabît vedigere.
Veguhastina X-ê: Ji hêla motora servo ya AC ve tê ajotin û kontrol kirin, kêmkera gerestêrkê ya pêbawer du stûnan dihejîne da ku bi xêzek li ser X-axê di nav cotê veguheztina pêça topê de bimeşin.
Forma rêhesinê rênîşander: Du rêçên rêberiya xêzikî yên rast-bilind li ser hev têne danîn. Di cotê veguheztinê de dereceya rastbûna pêça topê C5 e.
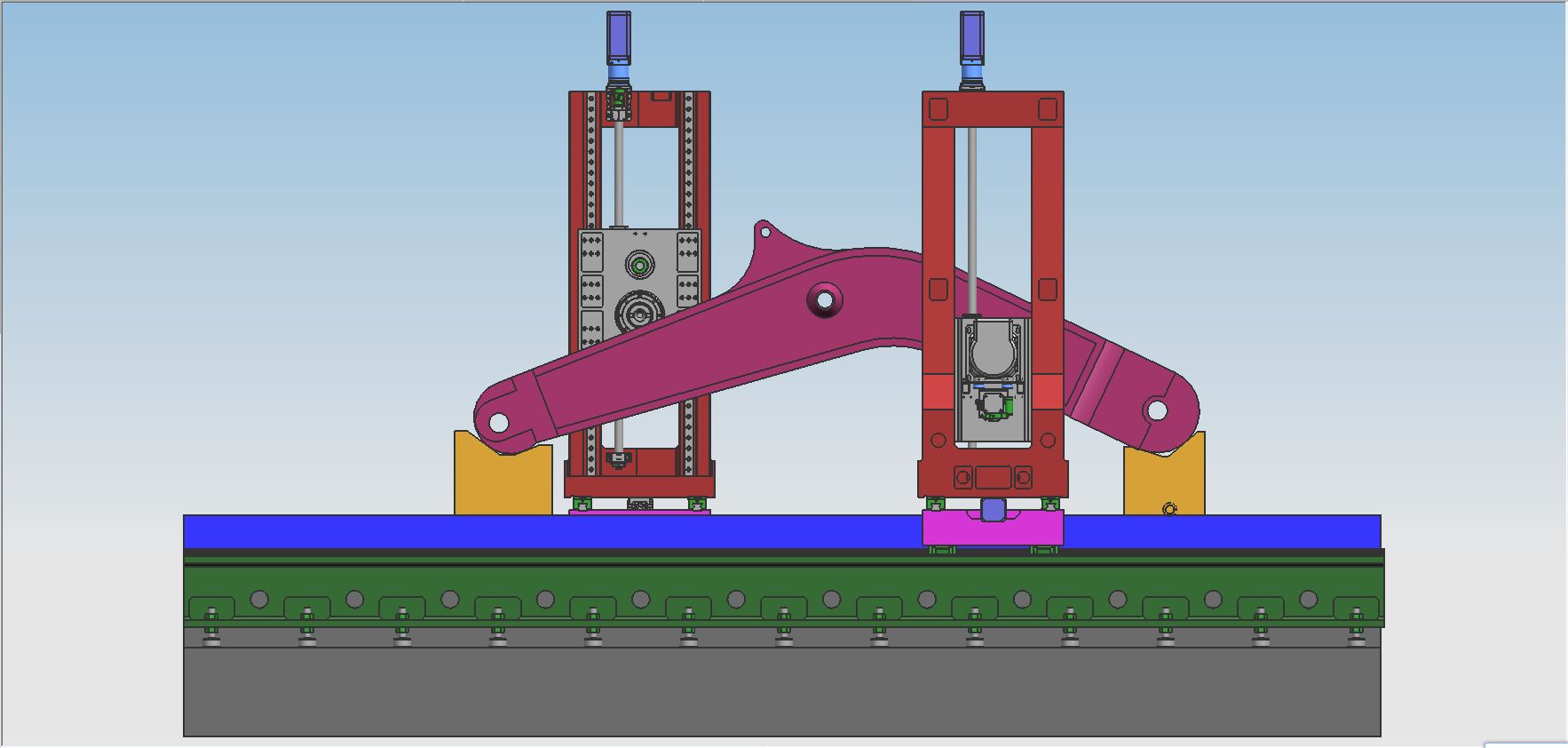
2.1.2 Axe Y1/Y2:Serên hêza borandin û rijandinê I, II û stûnên wan bi rêzê ve li ser rêçên rêberiya bingehîn a bi hêz-bilind li her du aliyan têne saz kirin, û bi rêyên rêberiya bingehîn re li ser axên Y1 û Y2 vedigerin. Servo motora AC-ê ji bo ajotin û kontrolkirina cotê veguheztina pêça topê tê bikar anîn, saddle bikişîne da ku hereket bike, û tevgera xêzkirî li ser eksê Y fêm bike.
Forma rêhesinê rênîşander: 4 rêçên rêberiya xêzkirî + ajokera gogê. Pîvana rastbûna gogê di cotê veguheztinê de C5 e, û kontrola nîv-girtî tê pejirandin.
2.1.3 Axe Z1/Z2:Serên hêza borandin û rijandinê I, II û çîpên wan ên xêzkirî bi rengek vekîlî li eniyên pêş ên stûnan li her du aliyan têne saz kirin, û li ser axên Z1 û Z2 ber bi jor û jêr ve rêyên rêberê stûnê vedigerin.
Veguheztina axis-Z1: motora servo ya AC ji bo ajotin û kontrolkirina kêmkerê gerstêrk-a-rast-aqîz û cotê veguheztina pêça topê tê bikar anîn, û ram tê rêve kirin ku bi xêzikî li ser xetê Z-ê bimeşe.
Forma rêhesinê rênîşander: 2 strukturên rêhesinê rênîşander têne pejirandin. Di cotê veguheztinê de dereceya rastbûna gogê C5 e.
2.2 Çip rakirin û sarkirin
Li her du aliyan veguhêzên çîpên zincîra spiral û davî hene ku di binê kargehê de têne saz kirin, û çîp dikarin di dawiyê de bi du qonaxên pîvazên spiral û zincîreyê ve bixweber werin veguheztin da ku hilberîna şaristanî pêk bînin. Di tanka sarkerê ya çîpê veguhezkarê de pompek sarbûnê heye, ku dikare ji bo sarbûna derve ya amûrê were bikar anîn da ku performans û jiyana karûbarê amûrê misoger bike, û sarker dikare were vezîvirandin.
3. Pergala kontrola hejmarî ya tevahî dîjîtal:
3.1. Bi fonksiyona şikandina çîpê, dema şikandina çîpê û çerxa şikandina çîpê dikare li ser pêwendiya mirov-makîneyê were danîn.
3.2. Bi fonksiyona hilkirina amûrê ve hatî peyda kirin, dûrahiya hilkirina amûrê dikare li ser pêwendiya mirov-makîneyê were danîn. Dema ku dûr tê gihîştin, amûr zû tê hildan, dûv re çîp têne avêtin, û dûv re ew bi lez ber bi rûyê sondajê ve tê şandin û bixweber vediguhere kar.
3.3. Qutiya kontrolkirina xebata navendî û yekîneya destan pergala kontrola jimareyî dipejirînin û bi navbeynkariya USB û dîmendera krîstalê ya laşî ya LCD-ê ve têne saz kirin. Ji bo hêsankirina bername, hilanîn, pêşandan û ragihandinê, navbera operasyonê fonksiyonên wekî diyaloga mirov-makîne, tezmînata xeletiyê, û alarma otomatîkî heye.
3.4. Amûr xwedan fonksiyona pêşdîtin û ji nû ve vekolîna pozîsyona qulikê berî pêvajoyê ye, û operasyon pir rehet e.
4. Lubrication otomatîk
Cotên rêhewayên rêwerzê yên rêwerzên rêgez ên rastîn ên makîneyê, cotên pêlên topê yên rast û cotên din ên tevgerê yên rast-bilind bi pergalên lubrîkasyonê yên otomatîkî ve têne saz kirin. Pompeya rûnê ya otomatîkî rûnê zextê derdixe, û jûreya rûnê rûnê rûnê mîqdar dikeve nav rûnê. Piştî ku odeya rûnê bi rûnê tije dibe, dema ku zexta pergalê digihîje 1.4-1.75Mpa, guheztina zextê ya di pergalê de girtî ye, pomp disekine, û valahiya dakêşanê di heman demê de bar dike. Dema ku tansiyona rûnê di rê de ji 0,2Mpa dakeve, lubrîkatorê mîqdar dest bi dagirtina xala rûnê dike û dagirtina rûnek tijî dike. Ji ber peydakirina neftê ya rast a derziyê rûnê mîqdar û tespîtkirina zexta pergalê, dabînkirina neftê pêbawer e, pê ewle dike ku li ser rûyê her cotek kinematic fîlimek rûnê heye, xitimandin û cilê kêm dike, û pêşî li zirarê digire. avahiya navxweyî ji ber germbûna zêde. , da ku rastbûn û jiyana Makîneyê misoger bike. Li beramberî cotê rêhesina rêberî ya xêzkirî, cotê rêhesina rêwerzê ya xêzkirî ya ku di vê makîneyê de tê bikar anîn rêzek avantajên xwe hene:
① Hesasiya tevgerê ya bilind, hevsengiya kêşanê ya rêça rêberiya gerok piçûk e, tenê 0,0025-0,01 e, û hêza ajotinê pir kêm dibe, ku tenê bi 1 makîneyên asayî re wekhev e. /10.
② Cûdahiya di navbera kêşana dînamîk û statîk de pir piçûk e, û performansa şopandinê pir xweş e, yanî navbera dema di navbera sînyala ajotinê û çalakiya mekanîkî de pir kurt e, ku ji bo baştirkirina leza bersivê û hesasiyeta pergala kontrola jimareyî.③Ji bo tevgera xêzikî ya bi leza bilind guncan e, û leza wê ya tavilê bi qasî 10 qat ji ya rêlên rêwerzên diherikî zêdetir e. ④ Ew dikare tevgera bêkêmasî fêm bike û hişkiya tevgerê ya pergala mekanîkî baştir bike. ⑤ Ji hêla hilberînerên profesyonel ve hatî hilberandin, ew xwedan rastbûna bilind, pirzimanî ya baş û lênihêrîna hêsan e.
5. Jîngeha karanîna makîneyê:
5.1. Pêdiviyên hawirdorê yên ji bo karanîna amûran
Parastina astek domdar a germahiya hawîrdorê ji bo makînasyona rasteqîn faktorek bingehîn e.
(1) Pêdiviyên germahiya hawîrdorê yên berdest -10 °C heya 35 °C ne, dema ku germahiya hawîrdorê 20 °C be, divê nembûn ji% 40 heta 75% be.
(2) Ji bo ku rastbûna statîk a Makîneyê di nav rêza diyarkirî de bimîne, germahiya hawîrdorê ya çêtirîn pêdivî ye ku ji 15 ° C heta 25 ° C be, û cûdahiya germahiyê
Divê ji ±2°C/24h derbas nebe.
5.2 Voltaya dabînkirina hêzê: 3-qonaxa, 380V, di nav rêza ± 10% guheztina voltaja de, frekansa dabînkirina hêzê: 50HZ.
5.3 Ger voltaja li qada xebatê bêîstîqrar be, pêdivî ye ku Makîne bi dabînkirina hêzek stabîlkirî were saz kirin da ku xebata normal a Makîneyê misoger bike.
5.4 Pêdivî ye ku makîneyê xwedan zemînek pêbawer be: têl axê têlek sifir e, pîvana têlê ji 10 mm² kêmtir nebe, û berxwedana zevî di nav 4 ohmê de piçûk e.
5.5 Ji bo misogerkirina performansa xebata normal a amûrê, heke hewaya pêça çavkaniya hewayê nikaribe hewcedariyên çavkaniya hewayê bicîh bîne, divê ew li ser Makîneyê were saz kirin.
Beriya hewayê komek amûrek paqijkirina çavkaniya hewayê (hilweşîn, paqijkirin, fîlterkirin) zêde bikin.
5.6 Amûran ji tîrêja tavê ya rasterast, lerzîn û çavkaniyên germê, jeneratorên bi frekansa bilind, makîneyên weldingê yên elektrîkê, hwd. dûr bixin, da ku ji têkçûna hilberîna makîneyê an windabûna rastbûna makîneyê dûr bisekinin.
6. Parametreyên teknîkî
| Cins | 1601 | |
| Mezinahiya perçeya xebatê ya pêvajoyê | Dirêjî × firehî × bilindahî (mm) | 16000×1000×1500 |
| Machine herî zêde feed | Firahî (mm) | 1300 |
| Mezinahiya maseya xebatê | Dirêjî X Firahî (mm) | 16000*1000 |
| Rêwîtiya stûnê | Stûn bi paş û paş ve diçin (mm) | 1600 |
| Bi jor û berjêr ve girêdidin | Rêwîtiya jor û jêr (mm) | 1500 |
| Bilindahî ji navenda spindle heya balafira maseyê | 100-1600 mm | |
| Spindle hêza bilind Horizontal serê hêzê yek du | Hejmar (2) | 2 |
| Spîndle taper | BT50 | |
| Broach | Bişkojka otomatîk, guheztina amûrê bi destan | |
| Dirêjahiya birçêker (mm) | ≤Φ200 | |
| Dirêjahiya lêdanê (mm) | M3-M30 | |
| Leza spindle (r/min) | 30~3000 | |
| Hêza motora spindle ya servo (kw) | 30*2 | |
|
| Dûrahiya rêwîtiyê ya çep û rastê di navbera du dawiya spindle de | 400-1600 mm |
| Rêwîtiya çep û rastê ya stûnên ducar (mm) | Her yek 600 | |
| Tool Cooling | Sarkirina hundir, sarbûna derve | |
| Rastbûna Positioning Dualî | 300mm | ±0.032 |
| Rastbûna pozîsyona dubare ya du-alî | 300mm | ±0.025 |
| Dimensions Machine | Dirêjî × firehî × bilindahî (mm) | Li gorî nexşeyan (heke di pêvajoya sêwiranê de guhertin hebin, em ê we agahdar bikin) |
| Giraniya giştî (t) | 72T | |