BOSM -Horizontal Counter Drilling and Boring Machine
1. Bikaranîna amûrê:
BOSM makîneya sondajê û borandinê ya horizontî ji bo pargîdaniya we Makîneyek taybetî ye ku kelûpelên vîncê yên bircê pêvajoyê dike.Makîne bi 2 komên sondajên horizontî û serikên hêza borandinê ve tê stend, ku dikarin di nav rêza lêdanê ya bi bandor de sondakirin, rijandin û borandina perçeyên xebatê pêk bînin.Birîn û pêvajoyek din, leza pozîsyona alavan zû ye, rastbûna pêvajoyê bilind e, û karbidestiya pêvajoyê bilind e.
2. Taybetmendiyên avahiya amûrê:
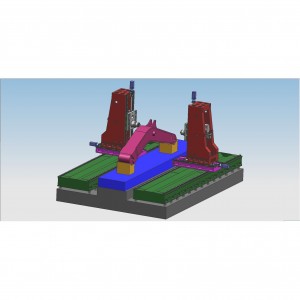
2. 1. Pêkhateyên sereke yênMakîne
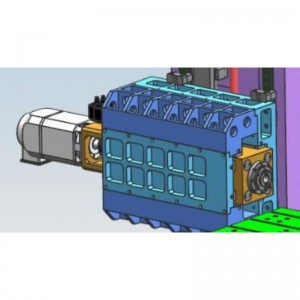
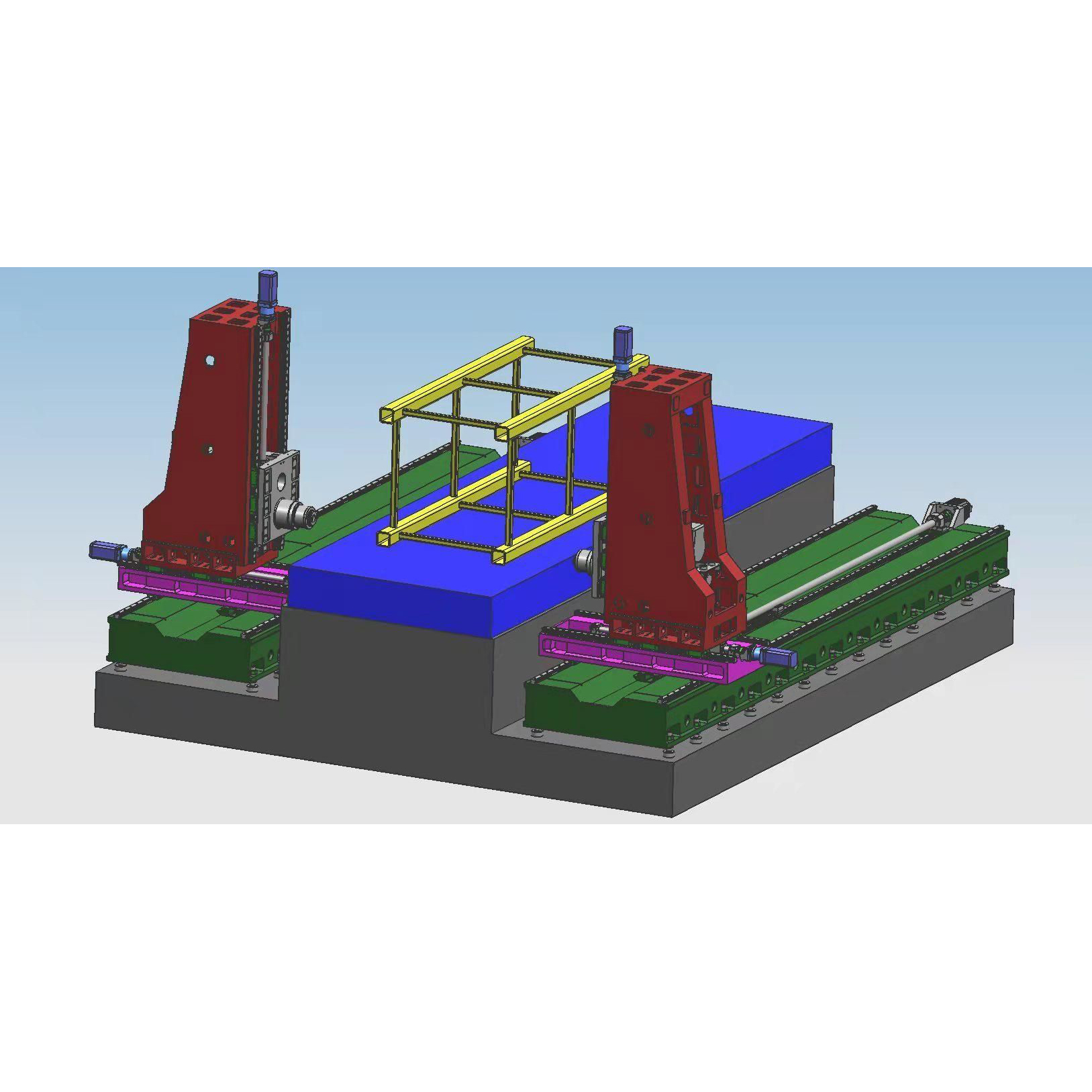
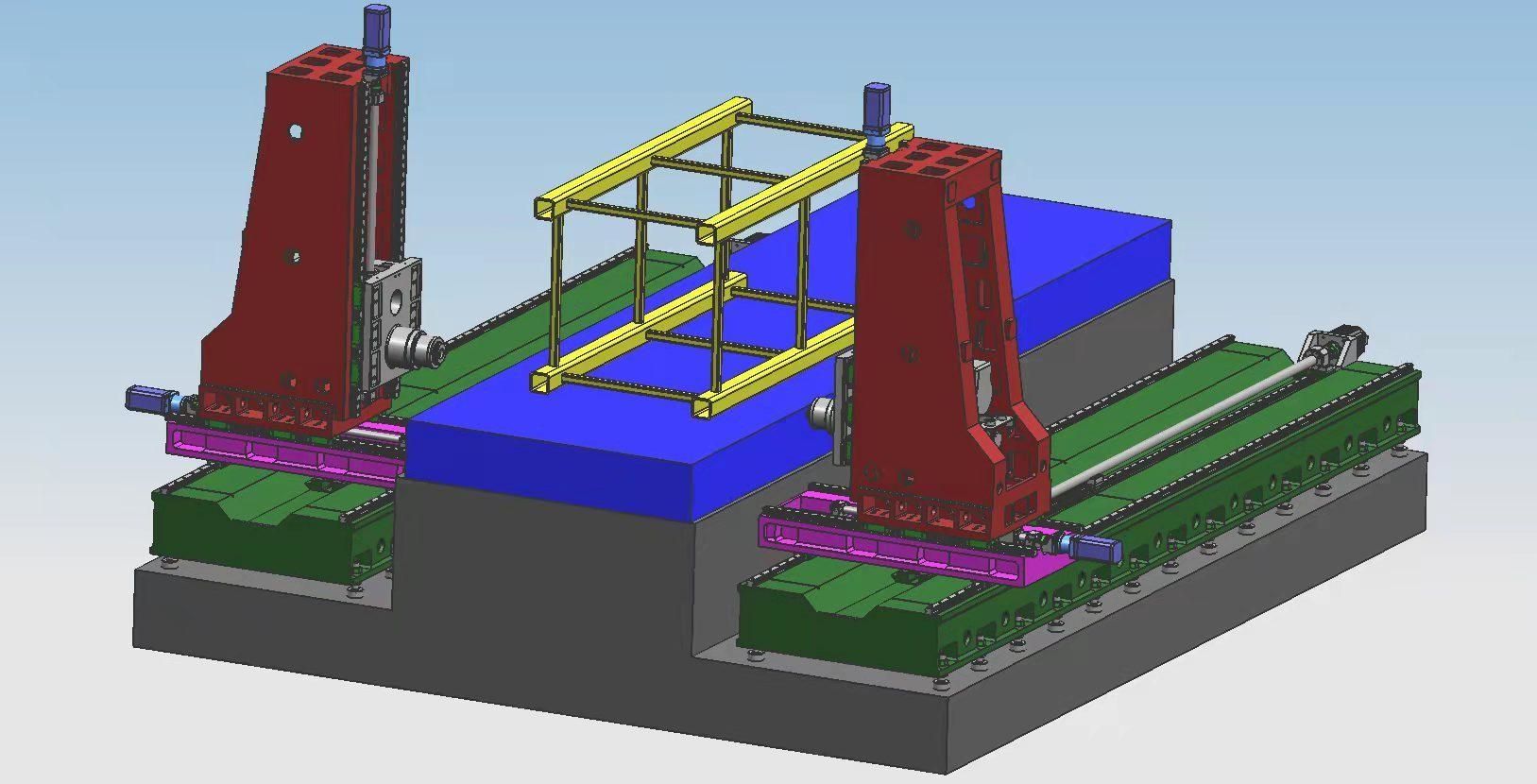
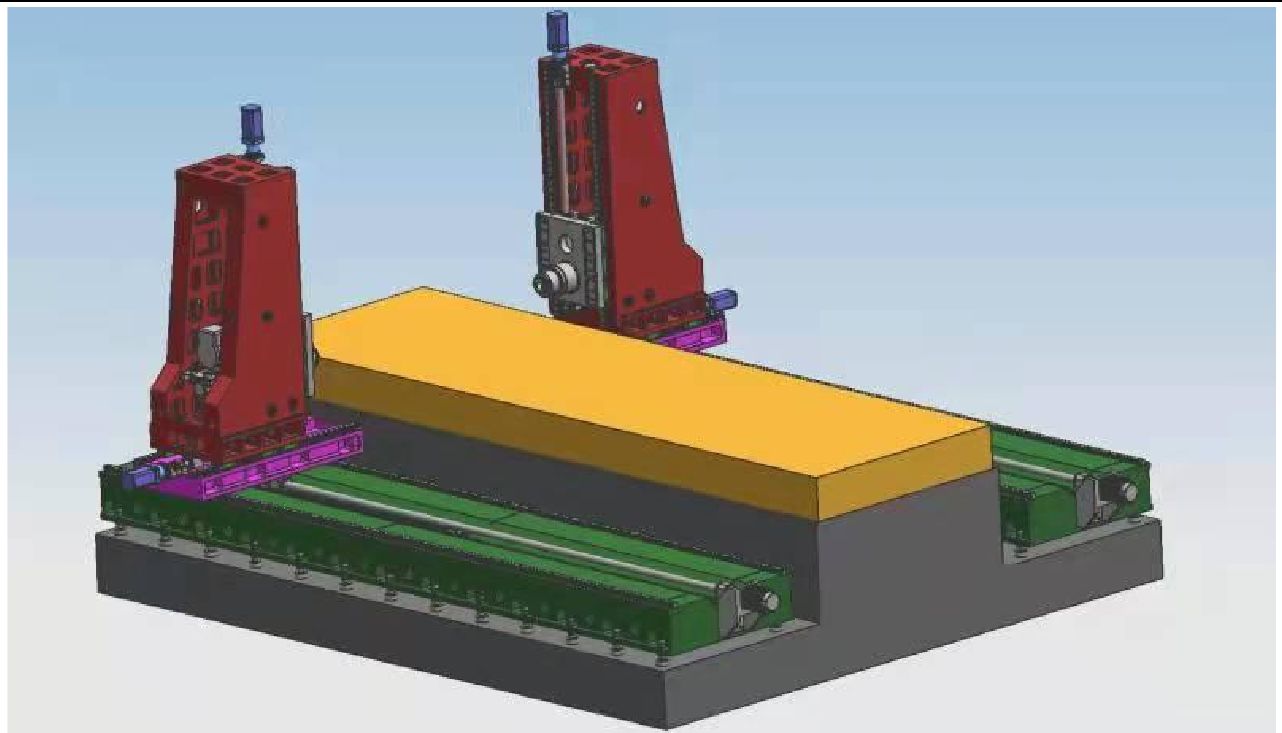
Pêkhateyên sereke yên Makîneyê: nivîn, maseya xebatê, stûnên çep û rast, sîn, beran, û hwd., Parçeyên mezin ji qalibkirina qûma rezînê, avêtina hesinê gewr-kalîteya bilind 250, di çala qûma germ de → pîrbûna vibrasyonê→ germ têne çêkirin. sobeya sobeyê → pîrbûna vibrasyonê → Makîneriya hişk → pîrbûna vibrasyonê → pîrbûna firnê→ pîrbûna vibrasyonê → qedandin da ku stresa neyînî ya parçeyan bi tevahî ji holê rabike û performansa parçeyan aram bimîne.Sermaseya xebatê ya amûrê sabît e, û serê hêzê li her du aliyan dikarin di rêwerzên pêş û paşîn ên bingehê de bimeşin;fonksîyonên makîneyê yên wek sondajê, borandin, bertengkirin, lêdan, hwd hene. Rêbaza sarbûna amûrê sarbûna hundurîn û sarbûna derve ye.Makîne 5 axên xwarinê, 2 serikên hêza birrîna dihewîne, ku dikarin di heman demê de bi 5 axen re bêne hevdeng kirin, an jî dikarin bibin yek-çalak.Arasteya eksê ya Makîneyê û serê hêzê di wêneya jêrîn de têne xuyang kirin.
2. 2 Struktura sereke ya beşa xwarinê veguhestina axial
2.2.1 Axe X: Serê hêzê ji alîkî ve li ser rêça rêberiya bingehê vedigere.
Ajokera X1-aksê: Motora servo ya AC plus kêmkerê gerstêrk-ya rast-bilind tê bikar anîn da ku serê hêzê di nav ajokera pêça topê de bimeşîne da ku tevgera xêzikî ya X-aksê fêm bike.
Veguheztina axis-X2: motora servo ya AC plus kêmkerê gerestêrkê-rast-bilind tê bikar anîn da ku serê hêzê di nav veguheztina pêça topê de bimeşîne da ku tevgera xêzika X-aksê pêk bîne.
Forma rêhesinê rênîşander: Du rêçên rêberiya xêzikî yên rast-bilind li ser bingehê firehkirî têne qewirandin.
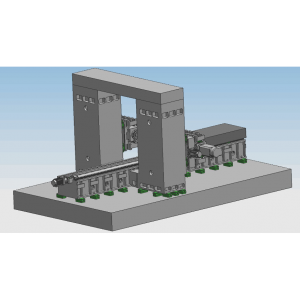
2.2 Axe Y1: Serê hêzê li ser stûnê jor û jêr vedigere.
Axîneya Y1: Motora servo ya AC-ê bipejirînin ku di nav pêça topê de bimeşe da ku tevgera xêz a Y1-tevgerê pêk bîne.Forma rêhesinê rênîşander: 4 perçe ji 45 cureyên rêyên rêberiya xêzkirî.
2.2.3 Axe Y2: Serê hêzê li ser stûnê ber bi jor û jêr vedigere.
Veguheztina axis-Y2: motora servo AC tê bikar anîn da ku di nav pêça topê de bimeşîne da ku tevgera xêz a Y1-tevgerê pêk bîne.
Forma rêhesinê rênîşander: 4 perçe ji 45 cureyên rêyên rêberiya xêzkirî.
2.2.4 Eksê Z1: Serê hêzê li ser sêlê paş û paş vedigere.
Veguheztina Tengava Z1: Motora servo ya AC û kêmkera gerstêrkê ya rast-bilind têne bikar anîn da ku tevgerê di nav pêça topê de bimeşînin da ku tevgera xêz a xêza Z1-ê fêm bikin.
2.2.5 Axe Z2: Serê hêzê li ser saddle paş û paş vedigere.
Veguheztina axis-Z2: motora servo ya AC û kêmkera gerstêrkê ya rast-bilind têne bikar anîn da ku tevgerê di nav pêça topê de bimeşînin da ku tevgera xêzek axê Z2-ê rast bikin.
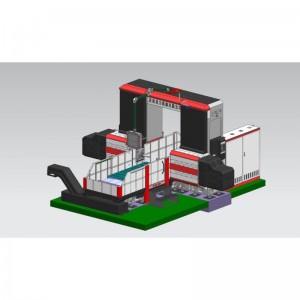
2.3. Çîp derxistin û sar
Li her du aliyan veguhêzên çîpên zincîre yên li binê kargehê hatine saz kirin, û çîpên hesin dikarin di dawiyê de di nav veguheztina çîpê de werin avêtin da ku hilberîna şaristanî pêk bînin.Di tanka sarkerê ya çîpê veguhezkarê de pompek sarbûnê heye, ku dikare ji bo sarbûna hundurîn + sarbûna derve ya amûrê were bikar anîn da ku performans û jiyana karûbarê amûrê misoger bike, û sarker dikare were vegerandin.
3.Pergala kontrola hejmarî ya dîjîtal a tevahî:
3.1.Bi fonksiyona şikandina çîpê, dema şikandina çîpê û çerxa şikandina çîpê dikare li ser pêwendiya mirov-makîneyê were danîn.
3.2.Bi fonksiyona rakirina amûrê re, dûrahiya hilgirtina amûrê dikare li ser pêwendiya mirov-makîne were danîn.Gava ku mesafe gihîşt, dê amûr zû were rakirin, û dûv re dê çîp werin avêtin, û dûv re bi lez ber bi rûyê sondajê ve bibin û bixweber veguhere kar.
3.2.Qutiya kontrolkirina xebata navendî û yekîneya destan pergala kontrola jimareyî dipejirînin û bi navbeynkariya USB û dîmendera krîstalê ya LCD-ê ve têne stendine.Ji bo hêsankirina bername, hilanîn, pêşandan û ragihandinê, navbera operasyonê fonksiyonên wekî diyaloga mirov-makîne, tezmînata xeletiyê, û alarma otomatîkî heye.
3.2.. Amûra fonksiyona pêşdîtin û ji nû ve teftîşkirina pozîsyona qulikê berî pêvajoyê ye, û operasyon pir rehet e.
4.Lubrication otomatîk
Cotên rêhewayên rêwerzê yên rêwerzên rêgez ên rastîn ên makîneyê, cotên pêlên topê yên rast û cotên din ên tevgerê yên rast-bilind bi pergalên lubrîkasyonê yên otomatîkî ve têne saz kirin.Pompeya rûnê ya otomatîkî rûnê zextê derdixe, û jûreya rûnê rûnê rûnê mîqdar dikeve nav rûnê.Dema ku odeya rûnê bi rûnê tije dibe û zexta pergalê digihîje 1.4 ~ 1.75Mpa, guheztina zextê ya di pergalê de girtî ye, pomp disekine, û valahiya dakêşanê di heman demê de tê rakirin.Dema ku tansiyona rûnê di rê de ji 0,2Mpa dakeve, lubrîkatorê mîqdar dest bi dagirtina xala rûnê dike û dagirtina rûnek tijî dike.Ji ber mîqdara rastîn a rûnê ku ji hêla rûnê mîqdar ve tê peyda kirin û jêhatîbûna tesbîtkirina zexta pergalê, dabînkirina neftê pêbawer e û piştrast dike ku li ser rûyê her cotek kinematic fîlimek rûnê heye, ku felq û cilê kêm dike û pêşî li zirarê digire. li avahiya hundurîn ku ji ber germbûna zêde pêk tê., da ku rastbûn û jiyana Makîneyê misoger bike.
5. Makînehawirdora bikar bînin:
Dabînkirina hêzê: Sê qonax AC380V±10%, 50Hz±1 Germahiya hawîrdorê: -10°~ 45°
6.Pîvanên pejirandinê:
JB/T10051-1999 "Taybetmendiyên Teknîkî yên Giştî ji bo Pergala Hîdrolîk a Makîneyên Birîna Metal"
7.Parametreyên teknîkî:
| Cins | 2050-5Z | |
| Mezinahiya perçeya xebatê ya herî zêde | Dirêjahî × firehî × bilindî (mm) | 5000×2000×1500 |
| mezinahiya maseya xebatê | Dirêjî X Firahî (mm) | 5000*2000 |
| Rêwîtiya rêberiya bingeha serê hêzê | Bi paş û paş ve biçin (mm) | 5000 |
| Desthilatdarî serî û xwarê | Ser û jêr lêdana ram (mm) | 1500 |
|
Serê hêza sondajê ya tîpa ram a horizontal Serê hêzê 1 2 | Hejmar (2 pc) | 2 |
| Spîndle taper | BT50 | |
| Dirêjahiya sondajê (mm) | Φ2-Φ60 | |
| Dirêjahiya lêdanê (mm) | M3-M30 | |
| Leza spindle (r/min) | 30~3000 | |
| Hêza motora spindle ya servo (kw) | 22*2 | |
| Rêwîtiya çep û rast (mm) | 600 | |
| Rastbûna Positioning Dualî | 300mm*300mm | ±0.025 |
| Rastbûna pozîsyona dubare ya du-alî | 300mm*300mm | ±0.02 |